At OpenAI, I co-led a team working on learning-based robotics.
This means developing methods to allow robots to learn new tasks quickly,
without being programmed explicitly for a specific task.
We’ve trained a pair of neural networks to solve the Rubik’s Cube with a human-like robot hand. The neural networks are trained entirely in simulation, using a new technique called Automatic Domain Randomization (ADR). TThis shows that reinforcement learning isn’t just a tool for virtual tasks, but can solve physical-world problems requiring unprecedented dexterity.
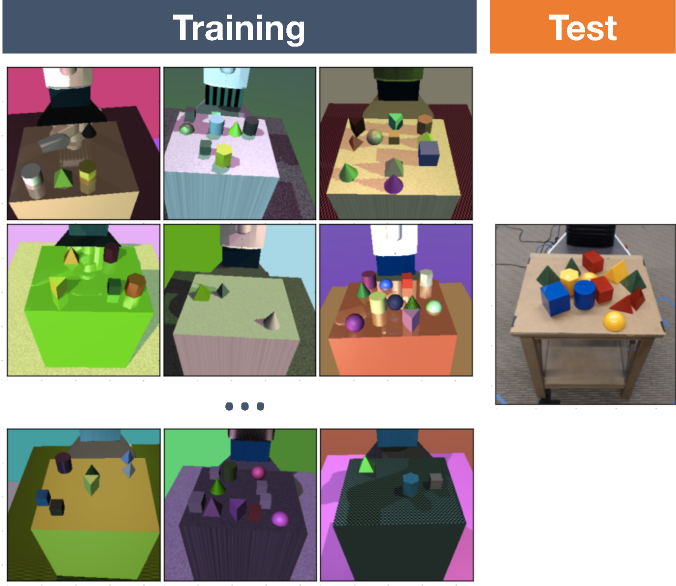
We’ve trained a human-like robot hand to manipulate physical objects with unprecedented dexterity. Our system, called Dactyl, is trained entirely in simulation and transfers its knowledge to reality, adapting to real-world physics using techniques we’ve been working on for the past year.
We’re releasing eight simulated robotics environments and a Baselines implementation of Hindsight Experience Replay, all developed for our research over the past year.
We’ve created a robotics system, trained entirely in simulation and deployed on a physical robot, which can learn a new task after seeing it done once.